
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Products
- AC Servo Motor
- DC Servo Motor
- Clausa loop Stepper Motor
- Hybird Stepper Motor
- Hybird Stepper Motor Coegi
- Clausa loop Stepper Motor Coegi
- AC Servo Motor Coegi
- Integrated Stepper Motor
- DC Servo Motor Coegi
- Screw Motor
- RS485 vel potest vel Ethercat bus genus Stepper Coegi
- Planetarium reducere
- PLC Controller
- HMI Tactus Screen
- Ethercat AC Servo Motor Coegi Kit
- A8 AC Servo Motor Coegi Kit
- Integrated Servo Motor
New Products
 Lichuan AC Servo Motor Coegi Kit ALTIS POTESTAS 235N.m 37KW AC380V 73A 1500/2000RPM IP65
Lichuan AC Servo Motor Coegi Kit ALTIS POTESTAS 235N.m 37KW AC380V 73A 1500/2000RPM IP65 Lichuan AC Servo Motor Coegi Kit SUMMA POTESTAS 191N.m 30KW AC380V 52A 1500/2000RPM IP65
Lichuan AC Servo Motor Coegi Kit SUMMA POTESTAS 191N.m 30KW AC380V 52A 1500/2000RPM IP65 Lichuan AC Servo Motor Coegi Kit ALTIS POTESTAS 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65
Lichuan AC Servo Motor Coegi Kit ALTIS POTESTAS 140N.m 22KW AC380V 44.7A 1500/2000RPM IP65 Lichuan AC Servo Motor Coegi Kit ALTIS POTESTAS 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65
Lichuan AC Servo Motor Coegi Kit ALTIS POTESTAS 88N.m 18.5KW AC380V 31.6A 1500/2000RPM IP65- Omnia nova products

A6 Series AC Servo Motor Coegi
LICHUAN® A6 Series AC Servo Motor Coegi proprium consilium habent & operandi practicam & competitive pretium, pro maiori notitia in A6 Series AC Servo Motor Coegi, liberum contactus nobis placet.
Mitte Inquisitionem
depictio producti
LICHUAN® benigne excipe te ad Lupum A6 Series AC Servo Motor Coegi ex officina nostra. Fructus nostri CE certificati sunt et nunc magna moles inventarii officinas habent. Nos tibi praebebunt bona opera et officinas discounted prices
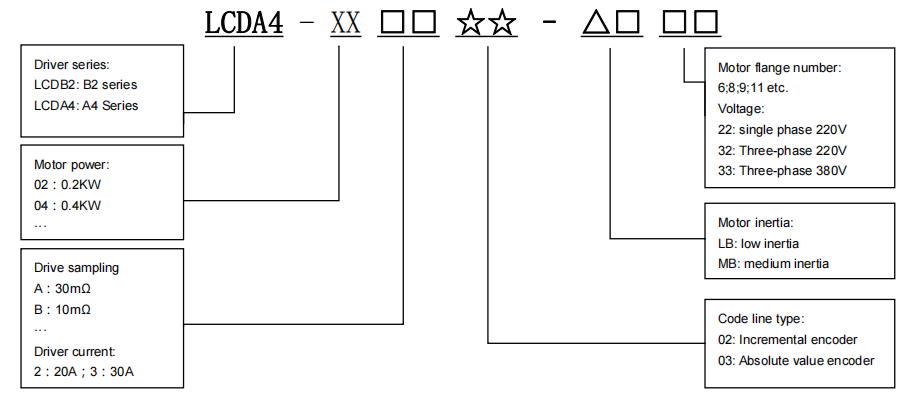
220V AC A6 specificationes servo motoris exactoris, A6 series servo agitatoris cum 17 frenum encoder, quod 131072 pulsus per revolutionem respondet, quae situm motoris valde meliorem efficit et motore stabilior potest facere minore celeritate et minus. celeritas erroris.
1.Support 2500ppr .17bit encoder AC servo motore .
2. Compositus pro AC servo motore aestimavit potentiam ab 50W-2.6KW
1.Support 2500ppr .17bit encoder AC servo motore .
2. Compositus pro AC servo motore aestimavit potentiam ab 50W-2.6KW
Caput II Electrical Specifications
| Input potestatem | MAGISTERIUM POTESTAS |
Singulare phase 220VAC |
| MAIN POTESTAS SUPPLEMENTUM |
Unius Phase/Tres Phasae 220VAC | |
| Operatio environment |
Temperature | 0~45℃ |
| Umor | Nihil condensationem ≤90% RH vel minus | |
| Elevatio | Altitudo ≤1000M | |
| Institutionem environment |
Vapores non mordores, vapores flammabiles, oleum membra vel pulvis, etc. | |
| Institutionem methodo |
VERTICA INSTALLATION | |
| Encoder videre | 2500 plr (resolutio: 10000), incrementum encoder | |
| Imperium signum |
Digital Input | X channels de normalis digital input, cum configurable munus. |
| Digital Output | 6 rivos ex instrumenti normali initus, cum configurabili munus. | |
| Pulsus annuit |
Input | 2 pulsus Suscipe pulsum initus modum: PULS+DIR,A+B,CW+CCW |
| Output | 3-viam altae celeritatis pulsum instrue, instrue signum fac: 5V signum differentiale. 1-via Z signum signum instrumentum signum. | |
| Analog quantitas signum |
Input | 2-viam analogi initus, 12-bit resolutionem, initus instrumentum -9.5 ad +9.5V. Ubi al2 fixa ut torque terminum input. |
| Output | Nullus | |
| Nuntius munus | RS485 communicatio, Modbus protocollum. Praecipuum moderatorem potest ponere positionem/celeritatem/torquem in servo pro RS485, 32 regere in stationes. | |
| Tabulariam operatio |
5 Bullae (Modo, Pone, Modum, scendit, descende) et 6 tubos digitales | |
| Regenerativa expediunt obstrepentes resistentes | Instructum-in 100W40Q restortorem praebuit. Extema restortorem exquirit ad frequentem braturam. | |
Compositum de coegi exemplar et motricium
| Exactoris exemplum | Motor Model | Potentia (KW) |
| LCDA6-XXA2 | 005L02-40M00130 | 0.05 |
| 01L02-40M00330 | 0.1 | |
| 02L02-60M00630 | 0.2 | |
| LCDA6-XXB2 | 04L02-60M01330 | 0.4 |
| 06L02-60M01930 | 0.6 | |
| 04L02-80M01330 | 0.4 | |
| 07L02-80M02430 | 0.75 | |
| 07M02-80M03520 | 0.75 | |
| 07L02-90M02430 | 0.75 | |
| 07M02-90M03520 | 0.75 | |
| 06L02-110M02030 | 0.6 | |
| 08L02-110M04020 | 0.8 | |
| LCDA6-XXC2 | 10L02-80M04025 | 1.0 |
| 10L02-90M04025 | 1.0 | |
| 10L02-130M04025 | 1.0 | |
| LCDA6-XXC3 | 12L02-110M04030 | 1.2 |
| 15L02-110M05030 | 1.5 | |
| 12L02-110M06020 | 1.2 | |
| 18L02-110M06030 | 1.8 | |
| 13L02-130M05025 | 1.3 | |
| 15L02-130M06025 | 1.5 | |
| 10M02-130M10010 | 1.0 | |
| 15M02-130M10015 | 1.5 | |
| LCDA6-XXD3 | 20L02-130M07725 | 2.0 |
| 26M02-130M10025 | 2.6 | |
| 23M02-130M15015 | 2.3 |
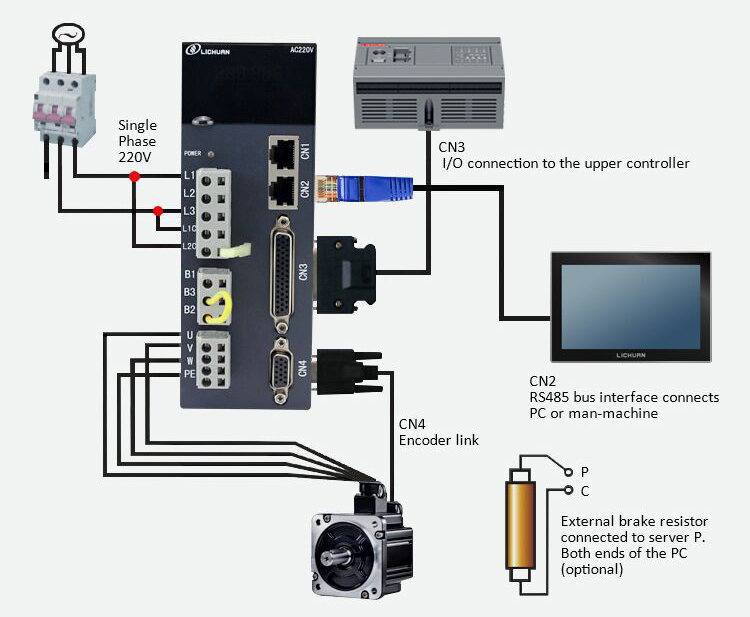
WIRNG DIGRAM OG SERVO PERIPHAERALIS APPARATUS
Abstractum wiring diagramma Lichuan A4 series servo exactoris et plures unctiones parametri communiter adhibitae.

Productio Lichuan Factory Products Machina
-

Sculptura Machina -

Coing Equipment -

Fibra ultima Vestigium Machina -

Screwing Machina -

Testis Machina -

UV Printer
-

Lorem Machina solidatorium -

Tenentes Torque Testis Machina -

Cochlea Machina -

Oscillograph Machina
Industria Applications
-

Robotic Arm -

Laser secans Machina
-

3D Typographia -

CNC Machina -

Lorem Assertmbly -

Sculptura Machina
Hot Tags: A6 Series AC Servo Motor Coegi, China, Manufacturers, Suppliers, Factory, Lorem, Factus in Sinis, Cheap, CE, Dura, Qualitas
Related Categoria
AC Servo Motor
DC Servo Motor
Clausa loop Stepper Motor
Hybird Stepper Motor
Hybird Stepper Motor Coegi
Clausa loop Stepper Motor Coegi
AC Servo Motor Coegi
Integrated Stepper Motor
DC Servo Motor Coegi
Screw Motor
RS485 vel potest vel Ethercat bus genus Stepper Coegi
Planetarium reducere
PLC Controller
HMI Tactus Screen
Ethercat AC Servo Motor Coegi Kit
A8 AC Servo Motor Coegi Kit
Integrated Servo Motor
Mitte Inquisitionem
Libenter placet, ut inquisitionem tuam in forma infra exhibeas. Respondebimus tibi in 24 horis.
Related Products






