
- English
- Español
- Português
- русский
- Français
- 日本語
- Deutsch
- tiếng Việt
- Italiano
- Nederlands
- ภาษาไทย
- Polski
- 한국어
- Svenska
- magyar
- Malay
- বাংলা ভাষার
- Dansk
- Suomi
- हिन्दी
- Pilipino
- Türkçe
- Gaeilge
- العربية
- Indonesia
- Norsk
- تمل
- český
- ελληνικά
- український
- Javanese
- فارسی
- தமிழ்
- తెలుగు
- नेपाली
- Burmese
- български
- ລາວ
- Latine
- Қазақша
- Euskal
- Azərbaycan
- Slovenský jazyk
- Македонски
- Lietuvos
- Eesti Keel
- Română
- Slovenski
- मराठी
- Srpski језик

Articulus ad differentiam intelligendi inter motores stepperos et servos et motores servos
I. Differentiae inter stepper motores et servos et servo motores
Stepper motor: est signum pulsum electricum in obsessione angulari seu linea obsessio elementi gradus motoris partium aperta-loop. Simpliciter posita, innititur signo pulsus electrica ad refrenandum angulum et numerum versuum. Solus igitur ille nititur in pulsus signo quantum rotationis determinet. Cum sensorem non sit, angulus sistens deflectat. Sed signum praecisum pulsus declinationis regit.
Servo motore: confidere in servo imperium circuit ut velocitatem motoris coerceat, per sensorem positionem rotationis moderari. Ita po- ditionis subtilis est. Ac celeritas gyratoria etiam variabilis est.
Servo (Electronic Servo): Pars principalis servo motor est servo. Continet imperium mobilem servo ambitum + reductionem calces statuto. Oh yeah, servo motore calces deminutio non habet. Servus autem reductionem habet calces.
In casu limitis servo, potentiometro sub output spiculo nititur ut angulum gubernaculi brachii gubernet. In servo signo ditionis est pulsus latitudo flectitur (PWM) signum, ubi microcontroller hoc signum facile generare potest.
II. Stepper motor principium
Quomodo operatur;
Plerumque rotor motoris est magnes perpetuus, et cum vena per anfractus stator fluit, ambages statora vectorem campum magneticum efficiunt. Hic campus magneticus per angulum gyrari coget rotor, ita ut directio par campi magnetici rotoris eadem sit ac directio campi magnetici statoris. Cum vector campus magneticus stator angulum circumagatur. Rotor etiam cum hoc campo magnetico angulum circumagatur. Pro unoquoque input pulsus electrica, motor unum gradum angularis ante gyrat. Dispositio angularis eius outputa proportionalis est numero pulsuum inputium, et celeritas eius gyratoria frequentiae pulsuum proportionalis est. Mutato ordine quo ambages agitantur motores contrarios. Numerus ergo et frequentia pulsuum et ordo energising ambages uniuscuiusque partis motoris potest moderari rotationem gradatim motoris.
Principium generationis caloris;
Solet videre omnia genera motorum, interna sunt nucleum ferreum et flexuosum anguium. Resistentia flexa, potentia damnum dabit, damnum magnitudine et resistentia et vena proportionalis quadrato, quod saepe ad damnum aeris refertur, si currens non est vexillum DC vel sine fluctu, damnum etiam harmonicum producet; nucleus hysteresis torsit effectum venam habet, in agro magnetico alternanti etiam damnum dabit, magnitudinem materiae, venae, frequentiae, intentionis cognatae, quae damnum ferreum appellatur. Damnum aeris et damnum ferri manifestabitur in forma caloris generationis, ita ad efficientiam motoris. Movens motor plerumque locum accurate et torques output persequi, efficientia est relative humilis, currens plerumque maior, et elementa harmonica alta sunt, frequentia currentis alterna cum velocitate et mutatione, ita motores gradus plerumque calorem habent situm, et res gravior quam motor AC generalis.
III. Gubernaculum constructionis
Servo principaliter componitur ex habitatione, tabula circuitione, motore propulsa, globulo reducente et elemento detectionis positionis. Eius principium operandi est quod accipiens signum mittit servo, et IC in tabula circuitionis agit coreless motoris ad movendum, et potestas ad adductius bracchium per reductionem calces transmittitur, et simul, positio detector signum remittit ad determinandum utrum ad situm pervenerit an non. Situs detector est actu resistor variabilis. Cum servo circumagatur, resistor valorem mutabit, et angulus rotationis cognosci potest de detectione pretii resistentis. Servus motor generalis est filum aeneum tenue circum rotor triticum circumvolutum, cum vena per spiram fluit generabit campum magneticum, et peripheria magnetis rotoris ad repulsionem producendam, quae vicissim vim rotationis generat. Secundum physicam, momentum inertiae objecti directe proportionale est suae molis, quo major moles objecti rotetur, eo major vis requiritur. Ad celeritatem gyrationis velocitatem et potentiam humilem consummationem consequendam, servo e filis aeneis tenuissimis in cylindrum concavis contortis, per levem admodum cavum rotorem nullis polis efformantibus, magnetes intra cylindrum, quod est motor poculi concavi, collocantur.
Ut ad varias operandi ambitus conveniat, servas imposito et pulvere proscriptorum sunt; et ad diversa onera requisita, phalangae plasticae et metallicae sunt pro servos, et phalangae metallicae pro servos plerumque summus torques et celeritas, utiliter ut anni nimiis oneribus non concidantur. Servos gradus superiores pilis gestus instrui faciet, ut celerius et accuratius gyratio fiat. Differentia est inter unam pilam gerentem et duas pilas gestationes, utique meliores sunt duo pilae gestus. Novi SERVI FET maxime utuntur FET (Field Effectus Transistor), quae utilitas humilis resistentiae internae habet et ideo minus detrimentum currentis quam transistores normales.
IV. Servo principium operandi
Ab unda pwm in ambitum internum ad generandum inclinato intentione, generans generans per reductionem phaleris ad pellendum potentiometrum ad movendum, ita ut cum nulla sit differentia intentionum, cessat motor, ut effectum servo consequatur.
Protocolla pro servo PWMs omnia eadem sunt, at ultimi servos videri possunt diversi.
Protocollum generaliter est: altam latitudinem in 0.5ms ~ 2.5ms ut servo imperas ut per varios angulos se convertat.
V. Quomodo servo motorum opus
Figura infra ostendit imperium motoris servo circuii cum potentia amplificante LM675 operationali facta, et motor DC servo motore est. Ut ex figura videri potest, potentia amplificantis LM675 operativa suppletur per 15V, et 15V intentioni additur initus initus amplificantis LM675 per RP 1, et additur inputatio intentionis LM675 in servo motoris. Motor celeritate mensurationis signo generantis instructa est ad detectionem celeritatis motoris real-time. Signum enim celeritatis generantis est genus generantis, eiusque outputa voltatio celeritati gyratorii proportionalis est. Procuratio intentionis e celeritate mensurandi signo generantis G alitur ad invertendum in inputationem amplificantis operativae sicut celeritas erroris signum post voltage divisoris circuii. Valor voltage velocitatis imperium potentiometer RP1 statutum additur ad initum initus amplificantis operationis post divisionem intentionis per R1.R2, quod aequivalet referenti intentioni.
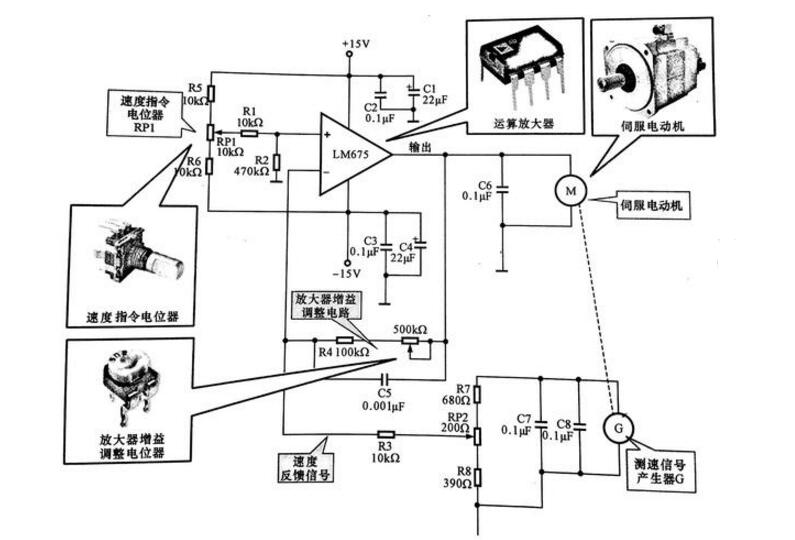
Schematic de servo motor imperium
Servomotor: Significatur littera M pro servomotor, fons potestatis est ratio coegi. Operational amplificator: nomine circuii designato, i.e., LM675, ampliatio est in ambitu servo dicionis, qui currentem monetae servo motori praebet.
Celeritas imperandi potentiometer RP1: intentionem amplificantis operationis in ambitu, i.e., celeritatis occasus referentem ponit. Amplificatio quaestus temperatio potentiometer RP2: Adhibetur in circuitione ad xylinum amplificatorium lucrum et magnitudo celeritatis feedback signum, respectively.
Cum onus motricium mutatur, voltatio in inversa initus amplificantis operativae etiam in inversa mutat, i.e., cum augetur onus motoris, celeritas decrescit, et outputa intentionis celeritatis signati generantis etiam decrescit, ita ut voltatio in inversa initus decrescat amplificantis operationis, ac differentia inter hanc intentionem et intentionem intentionis et intentionis intentionis crescat. Vicissim, cum onus minuitur et celeritas motoria crescit, output intentione celeritatis mensurandi signum generantis oritur, opiniones intentionis additae in inverso initus operationis augentis augentis, differentia inter hanc intentionem et intentionem intentionis decrescit, outputa intentionis amplificantis operativae decrescit, et celeritas motoria decrescit, ita ut celeritas rotativa statuta stabilita esse possit.


